Houdini Python#
Overview#
Using houdini python libs in normal python
- Hython.exe is a python shell wrapper that automatically sets env variables (http://www.sidefx.com/docs/houdini/hom/commandline)
- Call the houdini script setup to set necessary env variables (look at command line tools shortcut)
Common Recipes#
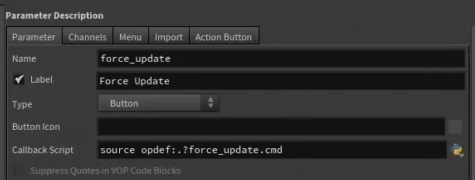
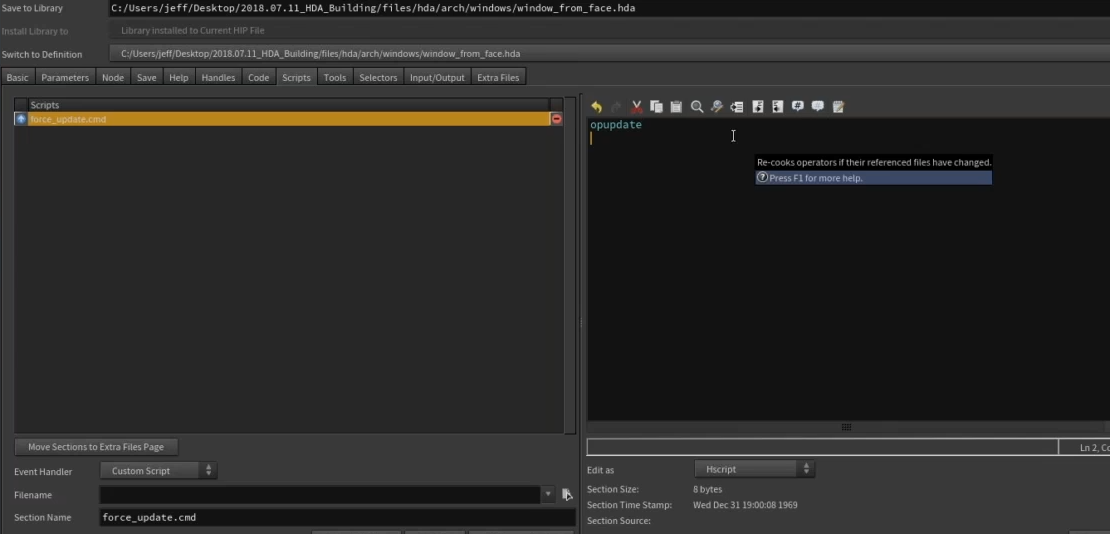
- Execute Python Script internal to HDA
-
CallbackScript: source opdef:.?force_update.cmd
-
Using houdini python libs in normal python
- Hython.exe is a python shell wrapper that automatically sets env variables (http://www.sidefx.com/docs/houdini/hom/commandline)
- Call the houdini script setup to set necessary env variables (look at command line tools shortcut)
-
Get Python Code for Houdini Node or Operator
Pythonprint hou.node('/obj/testgeo/ltcompute').asCode() -
Execute Python Script internal to HDA
CallbackScript:source opdef:.?force_update.cmd -
Execute Python Script internal to Subnet: (no need for reference to self or ../)
GLSLCallbackScript: exec(hou.node("PromoteXfmParmsForPoseLib").parm('python').eval());promoteParameters("./") CallbackScript: exec(kwargs['node'].parm('python').eval()) -
Callback on parameter update/change:
Pythondef callbackUpdateXfmRot(event_type, **kwargs): node = kwargs['node'] parmTuple = kwargs.get('parm_tuple', None) if not parmTuple: return if parmTuple and parmTuple.name() == 'computedFinalXfmRot' and node.evalParm('bUseLookAt'): node.parmTuple('xfmRot').set(node.evalParmTuple('computedFinalXfmRot'), follow_parm_references=True); node = kwargs['node'] try: node.removeEventCallback([hou.nodeEventType.ParmTupleChanged], callbackUpdateXfmRot) except hou.OperationFailed: pass node.addEventCallback([hou.nodeEventType.ParmTupleChanged], callbackUpdateXfmRot) -
Manipulate Node
PythonImport hou Import toolutils Hou.node("/obj/mynode") N = Node.parent().createNode("bright") n.setFirstInput(node) -
Get a list of all parameters on a node
Pythonall_parms = my_cam.parms() my_cam.parm("lookat").get() Node.parm("bright").set(amount) hou.parmTuple("pos").eval() hou.evalParmTuple("pos") -
Get Point Attributes
Python[ x.name() for x in hou.node('/obj/mygeo/mysop').geometry().pointAttribs() ] -
Python
hou.node('/obj/my_python_node').cook(force=True) -
Python
hou.parm('/obj/sphere_object1/rop_alembic1/execute').pressButton() -
Get Children of a node
PythonskelRigNode = hou.node(node.parm('skelRig').eval()) for child in skelRigNode.children(): print child -
Basic Code to get selected prim string
Pythonimport toolutils viewer = toolutils.sceneViewer() geo = viewer.selectGeometry() prims = geo.mergedSelectionString() -
If you want get list of Prims
PythonlistPrim = hou.selectedNodes()[0].geometry().globPrims(prims) -
Just list of Prim numbers
PythonlistPrimNum = [] for i in listPrim: listPrimNum.append(i.number()) -
Get the index of a vector parameter or current parmTuple channel
Pythonpwd().parm(expandString('$CH')).componentIndex() -
Get primitive from geo
PythoniterPrims()[23] -
Cur Node Path
Pythonscene_view = toolutils.sceneViewer() scene_view.pwd() hou.node('/obj/CloudThuggerVol/render_cam').path() => '/obj/CloudThuggerVol/render_cam' hou.node('/obj/CloudThuggerVol/render_cam').name() => 'render_cam' -
Setting Dynamic Parameter range
PythonnumSlices = kwargs['node'].parm('numSlices').eval(); newval = min(int(kwargs['script_value']), int(numSlices));kwargs['parm'].set(newval)
Math#
- Build Rotation
Pythonangle = v1.angleTo(v2) axis = v1.cross(v2) rot_xform = hou.hmath.buildRotateAboutAxis(axis, angle)
MultiParm parameters#
- Accessing
- Houdini appends the array index of the param block to all the attribute names.
- To reference, use '#'
- attribute name: "geo_node#" => houdini will substitute to "geo_node0", "geo_node1", etc
- It will automatically do this once it recognizes an attribute is inside a multiparm
- Default values: can be set doing the same thing using #. Ex: floor((# - 1)/9)*1.1
- Ex: http://www.andynicholas.com/?p=639&page=4
Dealing With Nodes#
Node/Graph Manipulation#
- Traversing node hierarchy:
hou.node() - Return the node at the given path, or None if no such node exists
- If you pass in a relative path (i.e. the path does not start with /), searches are performed relative to this node
- Note that the return value may be an instance of a subclass of Node.
- For example, if the node being found is an object node, the return value will be a
hou.ObjNodeinstance - If the path is an absolute path (i.e. it starts with /), this method is a shortcut for
hou.node(node_path) - Otherwise, it is a shortcut for
hou.node(self.path() + "/" + node_path)- See also hou.node_
- Access internal node named 'bindpose_after' in
constraintoffsetoperator
Pythonchoptoolutils.updatePose(kwargs['node'].node('bindpose_after')) - To get the parent node n:
n.node("..") - To get child named
geo5:n.node("geo5") -
To get sibling named
light3:n.node("../light3") -
Also look at
python3.7libs\houdinihelp\examples.py
Pythonsubnet = network.createNode("subnet", subnet_name) # Move the subnet next to the original node pos = node.position() subnet.setPosition(hou.Vector2(pos.x() + 3, pos.y())) # Remember which node we're making an example for subnet.setUserData("__example_for", typename) # Set the comment to tell the user what to do with this subnet subnet.setComment("Build example network inside,\n" "then RMB > Save Node Example") # Toggle node display or render flag subnet.setGenericFlag(hou.nodeFlag.DisplayComment, True)
Editor/HDA/Operator manipulation#
-
Reload Editor Node Shapes
Pythoneditor = hou.ui.paneTabOfType(hou.paneTabType.NetworkEditor) editor.reloadNodeShapes() -
Set node shape
Pythonnode.setUserData("nodeshape", "nodeshapeKLShield") -
Enable Houdini Environment for python command line
Pythondef enableHouModule(): '''Set up the environment so that "import hou" works.''' import sys, os os.environ['HFS'] = os.environ['EDEV_HOU_ROOT'] os.environ['PATH'] = os.environ['PATH'] + os.pathsep + os.path.abspath(os.path.join(os.environ['EDEV_HOU_ROOT'], 'bin')) sys.path.append( os.path.abspath(os.path.join(os.environ['EDEV_HOU_ROOT'], 'bin')) ) # Importing hou will load in Houdini's libraries and initialize Houdini. # In turn, Houdini will load any HDK extensions written in C++. These # extensions need to link against Houdini's libraries, so we need to # make sure that the symbols from Houdini's libraries are visible to # other libraries that Houdini loads. So, we adjust Python's dlopen # flags before importing hou. if hasattr(sys, "setdlopenflags"): old_dlopen_flags = sys.getdlopenflags() import DLFCN sys.setdlopenflags(old_dlopen_flags | DLFCN.RTLD_GLOBAL) try: import hou except ImportError: # Add $HFS/houdini/python3.7libs to sys.path so Python can find the hou module. sys.path.append(os.environ['HFS'] + "/houdini/python%d.%dlibs" % sys.version_info[:2]) import hou finally: if hasattr(sys, "setdlopenflags"): sys.setdlopenflags(old_dlopen_flags)
ROPS#
-
Full ROP Example
Pythondef cleanup(current_node): default_material_node = current_node.node("matnetwork/VSR_DEFAULT_MATERIAL") if default_material_node: default_material_node.destroy() default_render_node = current_node.node("rop_render/VSR_DEFAULT_RENDER") if default_render_node: default_render_node.destroy() default_comp_node = current_node.node("copnet/VSR_DEFAULT_COMP") if default_comp_node: default_comp_node.destroy() def doSetup(**kwargs): current_node = kwargs['node'] cleanup(current_node) inputs = current_node.inputs() # create default constant smoke material mat_node = current_node.node("matnetwork") default_material_node = mat_node.node("VSR_DEFAULT_MATERIAL") if not default_material_node: try: mat_gallery = hou.galleries.galleryEntries(name_pattern="constantsmoke")[0] new_mat_node = mat_gallery.createChildNode(mat_node) new_mat_node.setName("VSR_DEFAULT_MATERIAL") new_mat_node.parm("smokedensity").set(current_node.parm("density_multiplier").eval()) except IndexError as e: print "error: " + str(e) # create a defualt render node out_node = current_node.node("rop_render") default_render_node = out_node.node("VSR_DEFAULT_RENDER") if not default_render_node: try: new_render_node = out_node.createNode("ifd") new_render_node.setName("VSR_DEFAULT_RENDER") camera_node = current_node.node("render_cam") if camera_node: new_render_node.parm("camera").set("../../render_cam") res_x = current_node.parm("resolutionx").eval() res_y = current_node.parm("resolutiony").eval() camera_node.parm("resx").set(res_x) camera_node.parm("resy").set(res_y) # 0 = render current farame # 1 = render frame range new_render_node.parm("trange").set(1) new_render_node.parm("vm_picture").set(current_node.parm("output_path")) # some render settings if current_node.parm("quality").eval() == 1: parm = new_render_node.parm("vm_samplesx") if parm: parm.set(16) parm = new_render_node.parm("vm_samplesy").set(16) if parm: parm.set(16) parm = new_render_node.parm("vm_minraysamples") if parm: parm.set(4) parm = new_render_node.parm("vm_maxraysamples") if parm: parm.set(16) parm = new_render_node.parm("vm_volumequality") if parm: parm.set(1) parm = new_render_node.parm("vm_volumeshadowquality") if parm: parm.set(1) else: new_render_node.parm("vm_samplesx").set(3) new_render_node.parm("vm_samplesy").set(3) new_render_node.parm("vm_minraysamples").set(1) new_render_node.parm("vm_maxraysamples").set(9) new_render_node.parm("vm_volumequality").set(0.25) parm = new_render_node.parm("vm_volumeshadowquality") if parm: parm.set(0.5) except IndexError as e: print "error: " + str(e) # create a defualt comp node img_node = current_node.node("copnet") default_comp_node = img_node.node("VSR_DEFAULT_COMP") if not default_comp_node: try: new_comp_node = img_node.createNode("cop2net") new_comp_node.setName("VSR_DEFAULT_COMP") file_node = new_comp_node.createNode("file") file_node.setName("DEFAULT_FILE") sequence_path = current_node.parm("output_path") file_node.parm("filename1").set( sequence_path ) mosaic_node = new_comp_node.createNode("mosaic") num_slice = current_node.parm("num_slice").eval() mosaic_node.parm("imagelimit").set(num_slice) per_line = int(math.sqrt(num_slice)) mosaic_node.parm("numperline").set(per_line) rop_node = new_comp_node.createNode("rop_comp") rop_node.setName("DEFAULT_ROP") final_render_path = current_node.parm("output_pic_path").eval() final_render_path = final_render_path.replace("\\", "/") rop_node.parm("copoutput").set(final_render_path) rop_node.parm("alpha").set("C") rop_node.parm("trange").set(0) rop_node.setInput(0, mosaic_node) mosaic_node.setInput(0, file_node) file_node.parm("reload").pressButton() except IndexError as e: print "error: " + str(e) # setup frame range by number slices start_frame = 1 end_frame = current_node.parm("num_slice").eval() #hou.playbar.setPlaybackRange(start_frame, end_frame) setGobalFrangeExpr = 'tset `(%d-1)/$FPS` `%d/$FPS`' % (start_frame,end_frame) hou.hscript(setGobalFrangeExpr) -
Create bundle and lights
Pythondef create_rgb_light_rig(): if not hou.nodeBundle('rgb_lightrig'): rig_bundle = hou.addNodeBundle('rgb_lightrig') else: rig_bundle = hou.nodeBundle('rgb_lightrig') if (hou.pwd().parm('render_rgb_lights').eval()==1): obj = hou.node("/obj") if not hou.node('/obj/RGB_LIGHTRIG'): rig_subnet = obj.createNode('subnet', 'RGB_LIGHTRIG') null = rig_subnet.createNode('null') #y_pointing_down light = rig_subnet.createNode('hlight') light.setName("Y_Pointing_Down") light.parm('ogl_enablelight').set(0) light.parm('light_type').set(7) light.parm('light_colorr').set(0.0) light.parm('light_colorg').set(1.0) light.parm('light_colorb').set(0.0) light.parm('tx').set(0.0) light.parm('ty').set(5.0) light.parm('tz').set(0.0) light.parm('rx').set(-90.0) light.parm('ry').set(0.0) light.parm('rz').set(0.0) light.setFirstInput(null) rig_bundle.addNode(light) #y_pointing_up light = rig_subnet.createNode('hlight') light.setName("Y_Pointing_Up") light.parm('ogl_enablelight').set(0) light.parm('light_type').set(7) light.parm('light_colorr').set(0.0) light.parm('light_colorg').set(1.0) light.parm('light_colorb').set(0.0) light.parm('tx').set(0.0) light.parm('ty').set(-5.0) light.parm('tz').set(0.0) light.parm('rx').set(90.0) light.parm('ry').set(0.0) light.parm('rz').set(0.0) light.setFirstInput(null) rig_bundle.addNode(light) #x_pointing_left light = rig_subnet.createNode('hlight') light.setName("X_Pointing_Left") light.parm('ogl_enablelight').set(0) light.parm('light_type').set(7) light.parm('light_colorr').set(1.0) light.parm('light_colorg').set(0.0) light.parm('light_colorb').set(0.0) light.parm('tx').set(5.0) light.parm('ty').set(0.0) light.parm('tz').set(0.0) light.parm('rx').set(0.0) light.parm('ry').set(90.0) light.parm('rz').set(0.0) light.setFirstInput(null) rig_bundle.addNode(light) #x_pointing_right light = rig_subnet.createNode('hlight') light.setName("X_Pointing_Right") light.parm('ogl_enablelight').set(0) light.parm('light_type').set(7) light.parm('light_colorr').set(1.0) light.parm('light_colorg').set(0.0) light.parm('light_colorb').set(0.0) light.parm('tx').set(-5.0) light.parm('ty').set(0.0) light.parm('tz').set(0.0) light.parm('rx').set(0.0) light.parm('ry').set(-90.0) light.parm('rz').set(0.0) light.setFirstInput(null) rig_bundle.addNode(light) #z_pointing_away_from_camera light = rig_subnet.createNode('hlight') light.setName("Z_Pointing_Away_From_Camera") light.parm('ogl_enablelight').set(0) light.parm('light_type').set(7) light.parm('light_colorr').set(0.0) light.parm('light_colorg').set(0.0) light.parm('light_colorb').set(1.0) light.parm('tx').set(0.0) light.parm('ty').set(0.0) light.parm('tz').set(5.0) light.parm('rx').set(0.0) light.parm('ry').set(0.0) light.parm('rz').set(0.0) light.setFirstInput(null) rig_bundle.addNode(light) #z_pointing_towards_camera light = rig_subnet.createNode('hlight') light.setName("Z_Pointing_Towards_Camera") light.parm('ogl_enablelight').set(0) light.parm('light_type').set(7) light.parm('light_colorr').set(0.0) light.parm('light_colorg').set(0.0) light.parm('light_colorb').set(1.0) light.parm('tx').set(0.0) light.parm('ty').set(0.0) light.parm('tz').set(-5.0) light.parm('rx').set(0.0) light.parm('ry').set(180.0) light.parm('rz').set(0.0) light.setFirstInput(null) rig_bundle.addNode(light) #orient lights to camera camera_node = hou.node(hou.pwd().parm("camera").eval()) camera_rx = camera_node.parm('rx').path() null_rx = null.parm('rx') null_rx.setExpression("ch(\"%s\")" % camera_rx) camera_ry = camera_node.parm('ry').path() null_ry = null.parm('ry') null_ry.setExpression("ch(\"%s\")" % camera_ry) camera_rz = camera_node.parm('rz').path() null_rz = null.parm('rz') null_rz.setExpression("ch(\"%s\")" % camera_rz) mantra_node = hou.node(hou.pwd().parm("mantra_external").eval()) if mantra_node: mantra_node.parm('excludelights').set('@rgb_lightrig') else: obj = hou.node("/obj") rgb_lightrig = hou.node('/obj/RGB_LIGHTRIG') if rgb_lightrig: rgb_lightrig.destroy()
Kiryha's Snippets#
Kiryha's Python Snippets Inlined below
You can explore the node parameters with Python Shel:
- Create any node and tweak its parameters
- Run Python Shell.
- Type
node =, drag node to Shell (you will gethou.node('path/to/node')), press enter. - Type
print node.asCode()
Snippets#
Install pip in Houdini#
# Download and save get-pip.py
import os
os.popen('python get-pip.py').read()
Install package with pip in Houdini#
import pip
pip._internal.main(['install', 'package_name'])
Get Houdini environment variable#
import hou
# print current scene name
print hou.expandString("$HIPNAME")
Scene file operations#
import hou
sceneRoot = hou.node('/obj')
# Save current scene as file
hou.hipFile.save('C:/temp/myScene_001.hipnc')
# Export selected node to a file
sceneRoot.saveChildrenToFile(hou.selectedNodes(), [], 'C:/temp/nodes.hipnc')
# Import file to the scene
sceneRoot.loadChildrenFromFile('C:/temp/nodes.hipnc')
Get node from the scene#
import hou
node = hou.node('/<nodePath>/<nodeName>') # By name
node = hou.selectedNodes()[0] # By selection
# Get node content
node.children()
Get node upstream connections#
listParents = node.inputAncestors()
Create node in the scene#
To create any node wiyh Python you have to set parent node for that. You need to create Geometry node in OBJ context.
# Get scene root node
OBJ = hou.node('/obj/')
# Create Geometry node in scene root
geometry = OBJ.createNode('geo')
import hou
# Create transform node inside geo1
geometry = hou.node('/obj/geo1')
xform = geometry.createNode('xform')
xform.moveToGoodPosition() # Align new node
# Create new transform node linked to existing transform
xformNew= xform.createOutputNode('xform')
Delete node#
import hou
node = hou.node('/<nodePath>/<nodeName>')
node.destroy() # Delete node
Delete parameter expression (chennal, animation)#
import hou
node = hou.node('/<nodePath>/<nodeName>')
node.parm(<parameterName>).deleteAllKeyframes()
Copy node to another location#
import hou
node = hou.node('/<nodePath>/<nodeName>')
parent = hou.node('/<parentPath>/')
hou.copyNodesTo([node], parent)
Get and set parameters#
import hou
node = hou.selectedNodes()[0]
# get translate X
node.parm('tx').eval()
hou.parm('/obj/geo1/tx').eval()
hou.ch('/obj/geo1/tx')
# Get string parameter without token evaluation
node = hou.node('/obj/geometry/fileCache')
print node.parm('file').eval()
print node.parm('file').rawValue()
# >> C:/temp/myFile.1.bgeo.sc
# >> $HIP/myFile.$F.bgeo.sc
# set translate XYZ
node.parmTuple('t').set([0,1,0])
hou.parm('/obj/geo1/tx').set(2)
# Set parameters for selected Remesh SOP
remesh = hou.selectedNodes()[0]
remesh.setParms({'group': 'myGroup', 'element_sizing1': 1, 'iterations': 2})
Get Translate X keyframes of selected node#
import hou
node = hou.selectedNodes()[0]
node.parm('tx').keyframes()
Run hscript command form Python#
# Run Redshift IPR
hou.hscript('Redshift_openIPR')
Get all node parameters names#
def getAllNodeParameters(node):
# Return list of all parameters names for input node object
allParameters = [param.name()for param in node.parms()]
return allParameters
Connect nodes#
import hou
# Create transform nodes
xform_A = hou.node('/obj/geo1/transform1')
xform_B = hou.node('/obj/geo1/transform2')
# Connect transform_A to transform_B
xform_B.setInput(0, xform_A)
# Create merge
merge = node.createNode('merge')
# Connect xforms to a merge
merge.setNextInput(xform_A)
merge.setNextInput(xform_B)
# Get node inputs
merge.inputs()
# Get node outputs
merge.outputs()
Get groups#
import hou
node = hou.selectedNodes()[0]
groups = [g.name() for g in node.geometry().primGroups()]
print groups
Builder workflow (shop context)#
Create "Material Surface Builder" in SHOP context, dive inside.
import hou
shader = hou.node('/shop/vopmaterial1/lambert1')
out = hou.node('/shop/vopmaterial1/surface_output')
out.setNamedInput('Cf', shader, 'clr') # Set connection by name
out.setNamedInput(0, shader, 0) # Set connection by parameter index
# List all inputs for node 'surface_output'
print out.inputNames()
Filter node.children() output#
import hou
selectedNode = hou.selectedNodes()
def extractVop(listOfChildrens):
for node in listOfChildrens:
if node.type().name() == 'vopsurface':
return node
# return vopsurface nodes
vops = extractVop(selectedNode.children())
Same task with list comprehensions:
import hou
selectedNode = hou.selectedNodes()
# return vopsurface nodes
vops = [node for node in selectedNode.children() if node.type().name() == 'vopsurface']
Run compiled PySide2 UI#
This is the better option (then running *.ui files, see below)!
Create with QT Designer interface.ui file and save it somewhere where Houdini Python will see it (or add the path to the file to os.environ['PYTHONPATH']). Name main widget object (QWidget) "MyInterface".
Create compile_ui.bat file:
set UIFILE=%1
set UIDIR=%~dp$PATH:1
set FILENAME=%~n1
set SNAME=%UIDIR%%FILENAME%.py
CALL C:\Python27\Scripts\pyside2-uic.exe %UIFILE% -o %SNAME%
Drag and drop interface.ui on compile_ui.bat to get interface.py
In Houdini run this code in Python Source Editor window:
import os
import hou
os.environ['PYTHONPATH'] = 'path to compiled interface.py'
from PySide2 import QtCore, QtUiTools, QtWidgets
import interface
class Window(QtWidgets.QDialog, interface.Ui_MyInterface):
def __init__(self):
super(Window, self).__init__()
self.setupUi(self)
self.setParent(hou.ui.mainQtWindow(), QtCore.Qt.Window)
self.pushButton.clicked.connect(self.prn)
def prn(self):
print 'OLA'
win = Window()
win.show()
Run PySide UI#
Create and save a UI file with QT Designer. It could be just a blank widget (but not Main Window). In Houdini run this code in Python Source Editor window:
# Run *ui file in Houdini
import hou
from PySide2 import QtCore, QtUiTools, QtWidgets
class MyWidget(QtWidgets.QWidget):
def __init__(self):
super(MyWidget,self).__init__()
ui_file = 'C:/path/to/file.ui'
self.ui = QtUiTools.QUiLoader().load(ui_file, parentWidget=self)
self.setParent(hou.ui.mainQtWindow(), QtCore.Qt.Window)
win = MyWidget()
win.show()
You should have your window opened.
Tools#
Expand Alembic#
# Expand Alembic
# Recreate alembic hierarchy by object groups and names
# Select Alembic node, set
# Naming convention
# Hirarchy in alembic: OBJECT (group)/PART_01, ..., PART_## (meshes)
# OBJECTS: <objectName>_<objectVariation> : bootle_A
# PARTS: <objectName>_<objectVariation>_<objectPart> : bootle_A_label
import hou
# Get Alembic SOP
ABC = hou.selectedNodes()[0]
def checkConditions():
'''
Check if environment conditions allows to run script without errors
'''
if not ABC: # If user select anything
print '>> Nothing selected! Select Alembic SOP!'
return 0
def buildObjectsMap(listGroups):
# Create object map dictionary: each object = key, list of parts = values
objectsMap = {} # { OBJ: [PARTs] }
for partNameFull in listGroups:
items = partNameFull.split('_')
object = '{0}_{1}'.format(items[0], items[1])
part = items[2]
if not object in objectsMap.keys():
objectsMap[object] = [part]
else:
objectsMap[object].append(part)
return objectsMap
def buildGroupsList(object, listParts):
# Create string for BLAST SOP with list of groups for each object
groupsList = ''
for part in listParts:
name = '{}_{}'.format(object, part)
groupsList += ' ' + name
return groupsList
def expandABC(OBJ, objectsMap):
# Recreate alembic hierarchy
for object in sorted(objectsMap.keys()):
groupsList = buildGroupsList(object, objectsMap[object])
blast = OBJ.createNode('blast')
blast.setNextInput(ABC)
blast.setName(object)
blast.parm('group').set(groupsList)
blast.parm('negate').set(1)
blast.moveToGoodPosition()
def run():
if checkConditions() != 0:
# Setup Alembic properties
ABC.parm('loadmode').set(1)
ABC.parm('groupnames').set(4)
# Get Alembic container
OBJ = ABC.parent()
# Get all groups (PARTS) from alembic
listGroups = [g.name() for g in ABC.geometry().primGroups()]
# Build Objects Map
objectsMap = buildObjectsMap(listGroups)
# Expand Alembic
expandABC(OBJ, objectsMap)
print '>> EXPANDING DONE!'
run()
Import FBX into Houdini#
import hou
import os
dirFBX = 'P:/PROJECTS/NSI/PROD/3D/lib/ANIMATION/CHARACTERS/ROMA/FBX/'
filesNamesFBX = [fileName for fileName in os.listdir(dirFBX) if os.path.isfile(os.path.join(dirFBX, fileName))]
for fileName in filesNamesFBX:
fileFBX = '{0}{1}'.format(dirFBX,fileName)
if not hou.node('/obj/{}_fbx'.format(fileName.replace('.fbx',''))):
hou.hipFile.importFBX(fileFBX)
else:
print 'FBX {} EXISTS!'.format(fileName)
Convert imported FBX to geometry#
# 256 Pipeline tools
# Convert FBX subnetwork to Geometry node
# Import FBX into Houdini, select FBX subnetwork, run script in Python Source Editor
import hou
# Get selected FBX container and scene root
FBX = hou.selectedNodes()
OBJ = hou.node('/obj/')
def checkConditions():
'''
Check if environment conditions allows to run script without errors
'''
if not FBX: # If user select anything
print '>> Nothing selected! Select FBX subnetwork!'
return 0
def convert_FBX():
'''
Create Geometry node and import all FBX part inside
'''
# Create Geometry node to store FBX parts
geometry = OBJ.createNode('geo', run_init_scripts = False)
geometry.setName('GEO_{}'.format(FBX.name()))
geometry.moveToGoodPosition()
# Get all paerts inside FBX container
geometry_FBX = [node for node in FBX.children() if node.type().name() == 'geo']
# Create merge node for parts
merge = geometry.createNode('merge')
merge.setName('merge_parts')
# Replicate FBX structure in Geometry node
for geo in geometry_FBX:
# Create Object Merge node
objectMerge = geometry.createNode('object_merge')
objectMerge.setName(geo.name())
# Set path to FBX part object
objectMerge.parm('objpath1').set(geo.path())
objectMerge.parm('xformtype').set(1)
# Create Material node
material = geometry.createNode('material')
material.setName('MAT_{}'.format(geo.name()))
# Link Material to Object Merge
material.setNextInput(objectMerge)
# Link part to Merge
merge.setNextInput(material)
# Set Merge Node flags to Render
merge.setDisplayFlag(1)
merge.setRenderFlag(1)
# Layout geometry content in Nwtwork View
geometry.layoutChildren()
# Check if everything is fine and run script
if checkConditions() != 0:
# Get FBX network
FBX = FBX[0]
# run conversion
convert_FBX()
print '>> CONVERSION DONE!'
Create Material Stylesheet UI#
# Create Material Stylesheet parameter interface
# Select Geometry node, run script
import hou
# Get selected geometry node to create Stylesheet parameter
OBJ = hou.selectedNodes()[0]
# Define tags
dataTags = {'script_action_icon':'DATATYPES_stylesheet',
'script_action_help':'Open in Material Style Sheet editor.',
'spare_category':'Shaders',
'script_action':"import toolutils\np = toolutils.dataTree('Material Style Sheets')\np.setCurrentPath(kwargs['node'].path() + '/Style Sheet Parameter')",
'editor':'1'}
# Create parameter interface
group = OBJ.parmTemplateGroup()
folder = hou.FolderParmTemplate('folder', 'Shaders')
folder.addParmTemplate(hou.StringParmTemplate('shop_materialstylesheet', 'Material Style Sheet', 1, tags = dataTags))
group.append(folder)
OBJ.setParmTemplateGroup(group)
Flatten curve#
# Flatten curve: set Y coord = 0
coordList_SRC = '39.1665,0.362686,22.4173 55.3542,0.365759,10.9339'
coords = coordList_SRC.split(' ')
coordList_RES = ''
for xyz in coords:
listXYZ_SRC = xyz.split(',')
listXYZ_SRC = '{0},0.0,{1} '.format(listXYZ_SRC[0], listXYZ_SRC[2])
coordList_RES += listXYZ_SRC
print coordList_RES